智能巡检无人机的一些安全思考
时间:2020-08-28 作者:安帝科技
1背景
无人机不止是大家用来把玩的拍摄工具,其实在工业领域有很多应用场景,比如高空拍摄,智能巡检等等。
在一些环境比较恶劣的情况下,使用无人机进行高空等危险场景下的拍摄,然后将现场视频或照片传送至服务端,服务端通过图像识别、人工智能等技术对拍摄的照片或视频进行一系列处理,或进行高空设施故障排查,或进行日常高空设施巡检等等。这样不仅大大提升了工作效率,同时也减少了工作人员的施工危险。


2安全思考
无人机在智能巡检方面有如此多好处,在未来势必会有无限的市场潜力。那么作为安全从业者也有另一种考虑,无人机给人类带来方便的同时,有没有安全隐患,这些安全隐患会造成什么样的风险。
带着这些问题,我们对现有比较成熟的无人机应用场景进行了简单的分析,这类无人机一般由机身、控制主板(cpu、I/O)、GPS和SIM卡等其它一系列外设组合而成。
机身自然不必多说,是无人机的整个机身,用来固定旋翼、支架等其它部件。
控制主板就是用来连接和控制各个模块,使无人机拥有起飞、降落和控制等一系列功能的灵魂。
GPS是用来获取无人机的当前位置信息,并计算出飞往目的地的飞行路线。
SIM卡则是负责将无人机图像回传,指令接收等网络通讯。
了解了无人机的基本部件和功能后,作为安全从业者的职业习惯,就想看看在这个过程中,有哪些环节是企业不可控的,而这些不可控的点有没有可能被恶意用户利用,利用之后会带来哪些风险,这些风险应该采取哪些保护措施。
3攻击可行性分析
正常情况下,操作员或服务端通过网络向无人机发送飞行任务,该任务即是从A坐标飞往B坐标。无人机是通过GPS获取实时位置信息,然后计算从A点飞往B点的飞行路线,完成任务执行。
无人机飞行任务示例如下:
系统向指定无人机下发从A(X=0,Y=0)到B(X=100,Y=0)的飞行任务指令,无机通过GPS获取当前坐标(X=0,Y=0),飞往目的地址(X=100,Y=0),在到达目的地址后,执行相应拍照等任务,执行完成后,自动或人工地执行返航和降落等一系列操作。

如上图所示,无人机在整个任务执行过程中,共有四处可以被攻击或恶意破坏的可行性方案,分别是:暴力击落、GPS欺骗、流量劫持、服务端恶意指令下发。
除暴力击落获取无人机进行代码分析方案外,我们主要对无人机的GPS欺骗和服务端恶意指令下发进行了相应安全测试,测试结果见下文。
4无人机坐标欺骗劫持
在这个过程中,无人机要正确无误地执行完整个任务,指令和坐标地正确性就尤为关键,经过研究发现,被测试无人机的定位模块仅支持GPS信号,且无基站校验,所以可以很简单地实现GPS坐标欺骗,进而指导无人机飞向错误的地点,完成无人机劫持攻击。劫持攻击示意图如下:
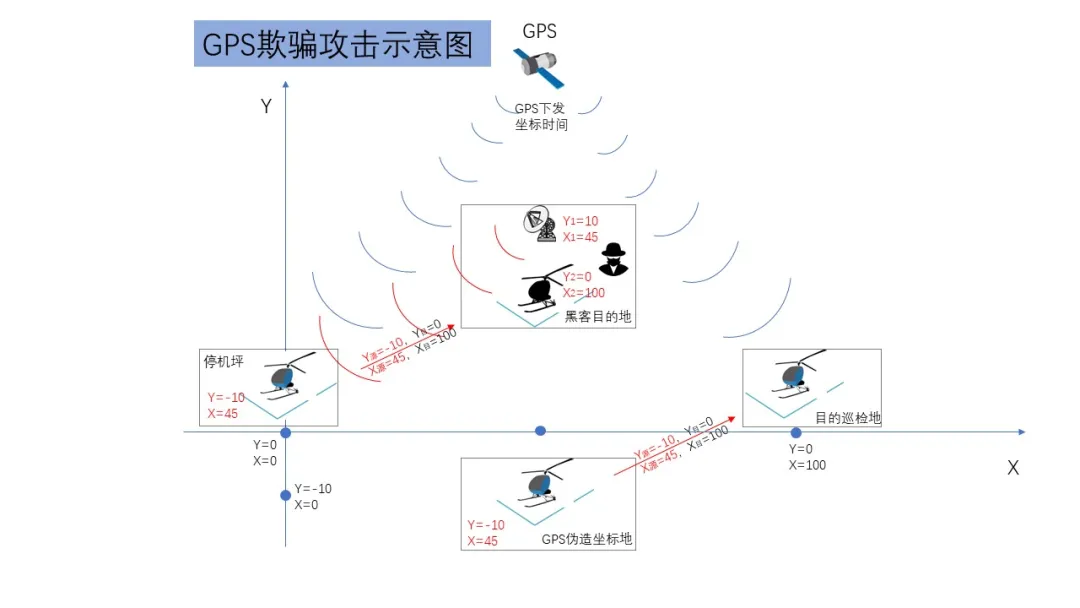
我们就无人机的GPS欺骗测试做了如下工作,首先通过一台无线收发设备对目标无人机进行GPS信号干扰(GPS接收设备只接收最强的几个GPS信号),同时将干扰信号的坐标设置为上图GPS伪造坐标地的位置,然后观察无人机的GPS坐标变化,最终无人机通过计算“当前”坐标和目标坐标之间的路线,完成无人机坐标欺骗支持。
5解决方案
我们日常使用的GPS都是民用GPS信号,而美国的民用GPS是对全球用户开放的,没有加密,只要你有能够接收GPS频段的设备就可以接收到美国民用GPS信号,然后就可以根据4颗卫星的位置计算出接收设备的当前位置。
由于GPS信号没有加密,接收设备接收到的GPS信号也就无从校验GPS信号的真伪,故而才会产生如上所示的安全隐患,要解决这个问题,我们就需要通过其它方式来校验当前接收的GPS信号是否可信。
其实这样的方案已经相当成熟了,实施起来也很方便,就是通过SIM卡连接的基站位置信息进行校验。因为当前SIM卡连接的基站一般是可信的,如果设备接收到的GPS位置坐标与SIM卡接收到的基站坐标差距太大,那么就选择相信基站坐标,这样就很容易避免被GPS劫持。
好了,今天的分享就到这里,至于其它两种攻击方式将在后文中讲解,请大家继续关注。







